|
|
看点:OpenAI让“机器人自主学习完成非特定的真实任务”成为可能。
5 e4 L$ t' F. m$ `1 e. A' W- i0 O8 S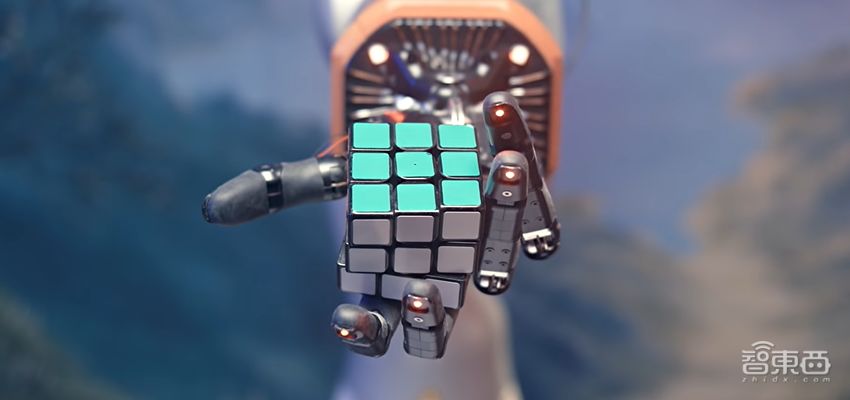 0 m% v* _0 z. I9 d! u 0 m% v* _0 z. I9 d! u
1 O* i' {# S# ?
6 u# s/ q8 m! ^9 V2 a9 K
1 X0 O% }6 y* X# |3 T& L0 Q智东西10月18日消息,解决鲁比克魔方一直是一件让世界各国挑战者为之疯狂的爱好,而蒙眼或者单手解魔方更是令其中的头号玩家们津津乐道的。近日据外媒报道,美国通用人工智能研究组织OpenAI推出了新款Dactyl机械手,集最新的AI算法于一身,通过机器自主学习,实现了“类人”机器人单手解魔方,代表着OpenAI在构建通用型自主学习机器人领域,又迈出了新的一步。
( Y3 ?) C2 f& i' O▲Dactyl解决魔方的快放视频! I- g. G9 e- Z! d/ z% R; { n+ K1 Z
野心勃勃:一双全能的手
* a5 w' f% d, d6 c: s, `! t/ c2 K" _' M* m6 T! o) w; j: ?
# R! o! N; E+ c9 P2 w5 E
2015年,44岁的Elon Musk,与Greg Brockman、首席科学家Ilya Sutskever、Y Combinator前CEO Sam Altman和天使投资人Peter Thiel共同创立了OpenAI。以研究高度自主且具有通用性质的人工智能系统作为长久以来的追求目标。此次推出的Dactyl是OpenAI去年开始研发的类人机器人手,目前已经成功解决了单手解决鲁比克魔方的问题。这一壮举的实现,得益于机器人部件灵巧性的提升和自身AI软件的巨大飞跃。总结来说,就是可以利用虚拟模拟(virtual simulations)技术让Dactyl在面对实际挑战之前,进行虚拟演练,并最终完成任务。; `4 {% w, G" b% @
▲Dactyl训练解决魔方的视频片段
$ c3 e1 ]& F; D: \+ I% l从演示视频中不难看出,Dactyl的动作还是有一些僵硬,并且初期的摸索也需要耗费一些时间,与人类几秒钟内解决魔方的快速熟练动作相比,它的动作明显要慢且少。尽管如此,对于OpenAI而言,Dactyl的成就还是让他们离AI和机器人行业所追求的目标更近了一步:可以通过自身学习解决实际问题,而不需要数月数年的训练和专门的编程。目前可以解决魔方的机器人非常多,例如2016年英飞凌(Infineon)开发的机器人可以用不到1秒的时间完成,2018年麻省理工学院研发的机器人可以在0.4秒内解决一个魔方,但它们都有一个共同的特点,就是专门为这项任务而设计,它们是无法完成其他不同任务的。这就是OpenAI的野心所在,它们希望可以构建一种通用型机器人,可以完成更多更广范围的任务,就像人的手,可以做各种各样的工作。6 ~ s1 }/ g$ \1 D$ a* V% D
像孩子一样学习3 b5 K3 {6 g% Y
) c$ d. F6 b, H. C. g1 T) z' k+ S# _2 _8 O: R9 |
Dactyl可能并不会像那些专业解魔方机器人那样迅速的解决一个立方体,就如同大家所看到的那样,他的动作比较缓慢。因为Dactyl的AI软件并不是为了解决魔方而特意设计的。也就是说不是为了在某个特定任务中取得优异结果而设计的。如果仅为了单一任务,只需要更强的机器人和更好的算法程序,甚至在没有人工智能的情况下也可以完成。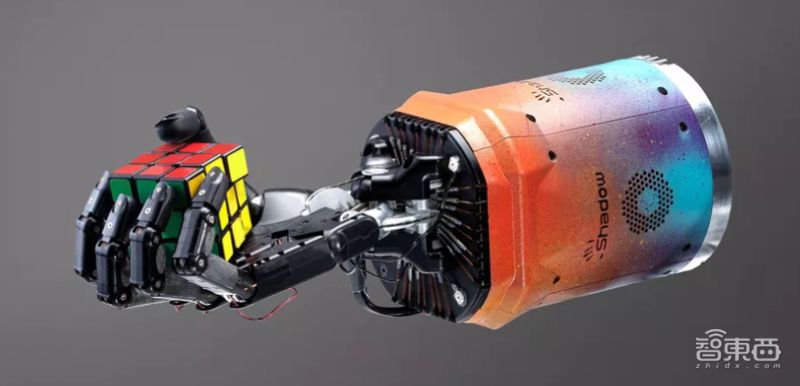
5 f4 S, M# I+ I( U+ H. l▲Dactyl握住鲁比克魔方与这样的机器人不同,Dactyl是一种自学式的机器人手,可以像人类一样处理新任务。它使用软件进行培训,这个软件,用一种非常基础的方式,尝试模拟数百万年来的生物进化过程,就像小孩学习如何使用自己的双手一样。OpenAI希望有一天可以研制出我们只能在科幻小说中读到的那种机器人。这种机器人可以安全地在社会中运行而不会危害我们,并且可以在城市街道和工厂车间等混乱的环境中执行各种任务。% d7 ` e6 }7 e2 F
用虚拟代替真实+ H0 t* S! P& Z O& W
" r; k3 J5 \$ G) S$ U6 P, j* \& E
Dactyl使用了最新的AI算法,一种基于激励(incentive-based)的深度学习,也被称作强化学习(reinforcement learning),去帮助它来自行解决问题,这种算法也被用于Dota2机器人,这个机器人在前不久刚刚战胜了世界排名第一的人类Dota2战队。但是玩游戏这种虚拟任务要比真实的任务容易的多,因为在虚拟世界中可以通过超级强大的CPU和GPU让AI在真实世界中花费几周几年时间来完成“数万年”的培训,从而强化自身。而这种方式,移植到实体机器人执行实际任务上,就是不可行的。这就是为什么OpenAI试图用模拟环境(simulated environments)代替真实世界,而这种方式在机器人培训领域可以说是前所未有的。这样,该软件可以同时在许多不同的计算机上加速练习,然后在软件真实控制机器人执行任务时应用这些训练成果。
% ` |2 F! ]9 Z▲Dactly的训练场景之一
0 v3 F' n4 t+ ~5 K: L" @3 p/ q. C5 I未来- h4 N! @# Q1 @9 }7 [1 ?
: O y& I0 z) u) x) }9 }$ W. `- m! ~6 P
机器人可以像人类一样对真实世界进行建模,并靠着对世界的直觉理解来完成从开门到煎蛋的一切工作。这是未来AI发展的目标。目前,OpenAI只是试图模仿人手这个身体部分,尽量去还原它的复杂性,并让它自然地运转。所以Dactly的机器人手是24关节的仿人设计。而让Dactly以人类方式利用这些关节,OpenAI已经通过软件对其进行了“数千年”的模拟训练。 " x3 t4 K2 N1 a' X* r# d2 E6 C! S " x3 t4 K2 N1 a' X* r# d2 E6 C! S
▲Dactly关节训练片段“人类是通过几百万年的进化,才拥有了现在的双手”OpenAI表示,对于将来有一天可以执行体力劳动或者家务的这类机器人来说,Dactly只是一小步,但也是至关重要的一步。将来它们甚至可以与人类一起工作,而不是独自孤独的在你家地下室昏暗的灯光下默默工作。同时你不需要去设置繁琐的程序来控制它们的动作。谈到对未来的愿景时,OpenAI表示,机器人学习新任务并适应不断变化环境的能力将与AI的灵活性和机械的可靠性一样重要。Dactly仿佛为我们打开了一扇窗,让解决纷繁复杂世界的问题不在是遥远的梦想。, `6 G' w8 g `) \# n
结语:这是OpenAI的一小步,是类人机器人发展的一大步- X# {* h( p* N5 @
5 [* O$ E* i! z' ^0 n) b4 D) W e
, q6 W$ A0 l3 c4 e4 r1 Y通过强大的AI算法和独创的机器人训练方式,OpenAI不仅实现了机器人单手解决魔方,更是让“机器人完成非特定的真实任务”成为了可能。使机器人初步拥有了学习新任务并适应不断变化环境的能力,向通用型自主学习更近一步。像Dactly这种类人机器人的研发,是需要雄厚的资金与强大的技术成果来推动的,而现在这些潜心致力于尖端技术突破的科技组织或企业不断让我们看到新的希望,在不久的将来,“剪刀手爱德华”或许不会仅仅停留在电影中了。文章来源:Theverge(本账号系网易新闻·网易号“各有态度”签约帐号) 0 X, v7 A# K: ^, m. S. M
6 s0 x. F$ f: \9 ]2 P$ L" |
2 F. u- J2 R0 U/ B/ S
' q, S" d. o! b) \* z% Y& J# y
, F! H. g8 B w/ c来源:http://mp.weixin.qq.com/s?src=11×tamp=1571410805&ver=1920&signature=hnv3o0L17IRuClYifMubWlYsqLJU5VUszNwZPzw8Hi0oWJ1wQI36jQnIaELyudX3hkK*cvTRf0WAVsImMlQG3HBoKlGvPaD9qd2wN6qbFz429DRBWHEUhtXQjDd2NOyg&new=1. d& R: T5 Q7 R" I* V
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! |
本帖子中包含更多资源
您需要 登录 才可以下载或查看,没有账号?立即注册

×
|
 /6
/6 
 |手机版|小黑屋|梦想之都-俊月星空
( 粤ICP备18056059号 )|网站地图
|手机版|小黑屋|梦想之都-俊月星空
( 粤ICP备18056059号 )|网站地图

 发表于 2019-10-18 23:45:55
发表于 2019-10-18 23:45:55
