|
|
 hi188| 编辑
6 l' i9 J/ z5 @4 D0 }* I近期正在韩国首尔国际计算机视觉大会(ICCV)上,一大波的AI研究继而公布,Facebook计划发表40多篇论文,其中我们关注到2D照片下三维场景重建与内容理解,等等3D图像分析的研究。
2 O( @ W: [7 Q- Y这些有什么作用呢,我们知道随着5G技术和千兆宽带的普及,届时的互联网媒介形式势必也会迎来改变,其中以AR/VR体验的三维形态的媒体内容被看作重点方向。
* E& R- d9 C9 D随着场景形态逐渐向三维转变,届时将会迎来一个高度逼真的虚拟世界,而三维内容的理解也将变得更为重要。例如现在的AI技术可以很好的识别2D照片/视频中的物体、动作等等,而到了三维场景中又会迎来新的玩法。
. i' p9 Q# y* \; v, Q; I F( W$ o+ B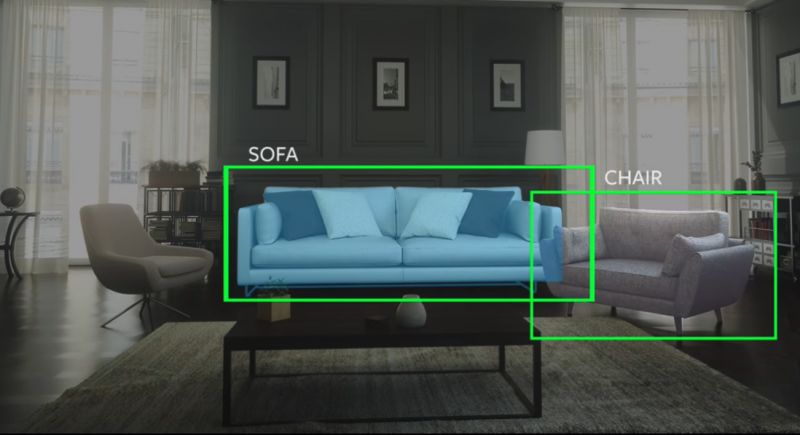 9 {' \2 T( a6 u( B 9 {' \2 T( a6 u( B
Facebook AI研究院今天发布的一篇博客中,着重提到了其在3D内容理解上的努力。
; d8 Y% \( {$ l文章中提到,想要了解周围的世界的前提是,AI必须能够理解三维视觉场景,这种需求不仅仅体现在机器人、导航、AR/VR等方面,甚至在2D照片/视频中也得能够正确识别出其中的一个杯子的三维形状等等。
7 I/ P i' a O5 D8 a# [/ [以下的几项研究,正在以不同但互补的方式来推进三维场景解析技术的发展。" W; ]) @8 |$ N
5 }3 F; }6 i3 z) _5 G* W
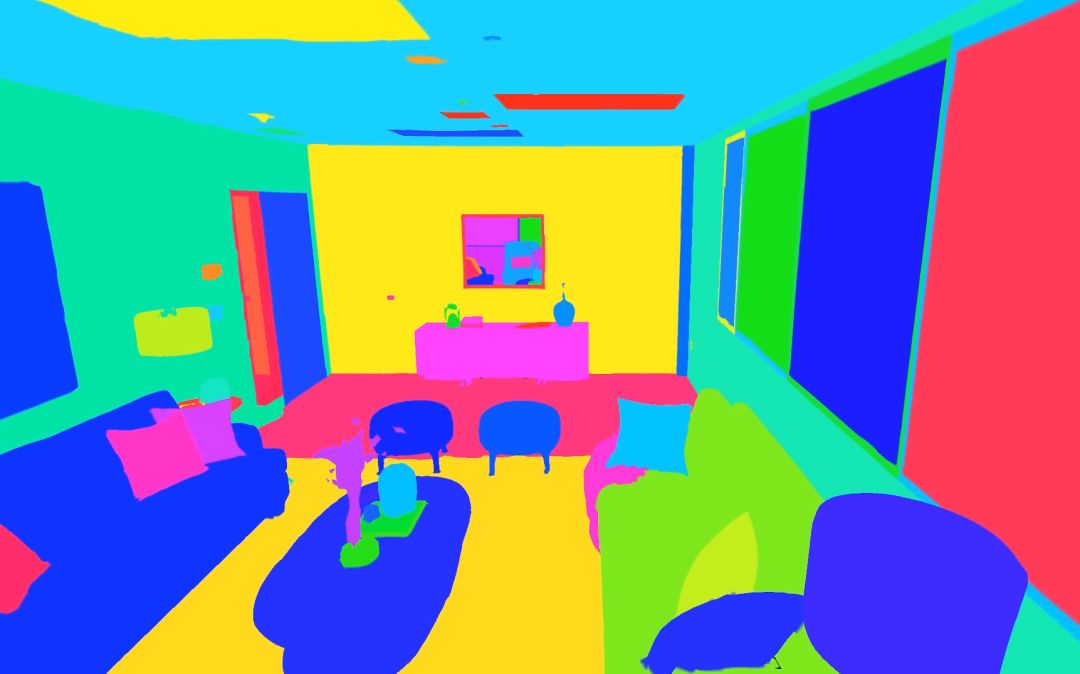
- Mesh R-CNN,一种可以精准预测现实环境中2D图像中物体的3D形状的框架,其可以检测复杂的对象,比如椅子腿儿、被遮挡的家具等;
9 z. L9 `4 w4 K/ \/ L - C3DPO,一种在2D关键点注释中,提取出可变性对象的3D模型的方法,已用于14个类别的对象,通过2D关键点标注实现,无3D标注信息;" D% x3 y' X- P+ g* y2 Y) A
- 通过新方法学习图像像素与3D形状之间的关联,大大降低对注释训练的依赖,从而更接近可以实现更多种类对象3D重建的自我监督系统;; G( [- J8 F0 W7 M
- VoteNet技术,可在LiDAR或其它3D传感器输入可用时,进行对象检测,该系统完全基于3D点云技术,精度更高。) r7 L0 ~& W' C2 a8 V2 V* I5 D
% D- B" c, d1 y( L+ Q" R" O
$ \/ H# e' }4 h# s+ w 如何更好的解析出3D形状8 U3 E8 N5 ~9 j. |6 }* O
包括Mask R-CNN在内的很多图像解析AI框架,往往是在2D环境中进行工作,在3D环境下可能并不适用。不过,凭借2D环境中的感知技术作为积累,Facebook重新设计了一个3D对象重建的AI模型。0 t0 b5 W3 u, ?2 U9 z9 l" N9 X& H
该模型的特点是可在现实的场景图片中去预测3D对象的形状,而这其中的挑战在于光学部分,例如:是否有遮挡,是否有杂波以及其它拓扑的对象。
) `' e8 W1 S* A6 J$ F为了应对挑战,首先通过网格预测分支加强Mask R-CNN在2D对象分割系统,并构建Totch3d(Pytorch库)从而实现:Mesh R-CNN,其通过Mask R-CNN进行对象的检测和分类。然后通过新型网络预测模型推测3D形状,该预测包含体素预测和网格细化共同构成。' C0 B2 Y Y- C) n
 9 h, I- z7 Z/ } 9 h, I- z7 Z/ }
最后通过Detectron2完成整套框架的结构,即:输入RGB图像--检测物体--预测3D形状的过程。# j L( N3 \5 \+ W# d _% \% d
据悉,Facebook的新型方法支持成对图像和网格的完全监督学习预测3D形状,为了进行训练,Facebook还是用10000对图像和网格组成的Pix3D数据集,这个数据集比其它训练数据集(通常10万个图像、需进行标注)要小很多。
b3 S. i$ o1 k5 z _$ r* l' Y最终在两个数据集上进行Mesh R-CNN的评估,效果比较理想。在Pix3D数据集上,能够检测所有类别对象,并能预测出被遮挡的家具的完整形状;而在ShapNet数据集上,体素预测和网格细化的混合法比以前要好7%。
4 l: F' Z) X Z8 V; h / g. k* m" }: C, j' W% O / g. k* m" }: C, j' W% O
准确预测、并重建现实世界中无约束的场景形状,无疑是增强未来AR\VR等其它类似体验的重要工作。联想到Facebook在今年OC6公布的共享空间和3D重建体验,以及未来面向AR和机器视觉等众多体验的合集LiveMap,这些都是技术的基础。
; a: F$ w: ]5 q* y# P尽管如此,和2D图像相比,3D图像在收集注释数据的工作上要复杂得多,且更为耗时,这也是3D形状预测数据集比2D对应数据集进展要落后的原因,而接下来Facebook也在探索更多不同的方法,利用监督学习和自我监督学习来重建3D对象。* I( K3 K3 M: E3 j w1 n" @) C7 K
使用2D关键点重建3D对象类别
! w: `" O2 ` i* \, S对于那些无法使用网格和图像训练、且无需完全重建静态对象/场景的案例,Facebook开发了一种新的代替方案:C3DPO,其通过大量丰富的2D关键节点数据,进行监督学习实现更好的重建结果。而C3DPO以弱监督的方式解析出3D几何形状,且被证明适合大规模部署。* O( C% Y* M& L
' o+ }5 ] U2 @3 w p u+ E/ _其中特定部分(例如人体关键、鸟翅膀)的2D关键点,成为了该方法中重新构建对象几何形状、变形或视点变化的线索。这些3D关键点利用价值也很高,例如在VR中创建逼真的面部和全身网格模型时。( U4 q+ L. Z5 V" F& V
简单来讲,C3DPO是一种能重建包括数十万具有上千个2D关键点的数据集方法,并且针对三种不同的数据集、14种以上的非刚性物体类别,进行精度重建。另外,和Mesh R-CNN类似,C3DPO同样支持那些有遮挡或部分缺失图像。
! T& B6 y8 W- _$ D. u而C3DPO模型还具备两个创新,一是,在给定一组单眼2D关键点的情况下,C3DPO将以标准方向预测相机视点的参数和3D关键点位置;二是,Facebook提出一个新的正则化技术,其包括与3D重建网络模型共同学习的第二个辅助深度模型,它解决了因分解3D视点和形状带来的冲突。正是基于这两项创新,才是C3DPO的方法比传统的数据统计模型表现更好。
: ^2 z( |: V% m% S6 e; v0 r根据Facebook描述,这种3D模型构建在以前是无法实现的,主要由于此前基于矩阵式分解的方法有很多限制,与C3DPO采用的深度网络模型不同,其能够“小规模”运行。为了解决3D重建带来的变形问题,此前往往通过同一时间多张图像合成解决,这对硬件要求更高,而C3DPO则可以在硬件无法进行3D拍摄(例如飞机等体型特别大的物体)的情况下实现3D重建。0 ~- m7 k! C4 j$ g" V
另外还有从图像集学习图形像素与形状的映射关系,以及提升3D系统中对象检测能力的两个论文本文不再解读,感兴趣可阅读原文了解。
! g, [0 H- ?! W5 U总而言之,3D计算机视觉领域还有很多值得探究的领域,还有很多问题尚未被解决,还需要像此前进行2D计算机视觉探索那样继续前行。随着数字世界的不断推进,我们将会转向使用3D照片、AR、VR等技术,因此未来需要更准确的理解场景中对象、交互动作等一系列复杂的问题。Facebook表示:能够开发出向人类一样理解现实世界,并与之互动的AI系统是其长期目标。诚然,这就需要不断缩小物理空间和数字化的虚拟空间之间的隔阂与距离,而在3D视觉方面就还有很多工作需要大家共同努力。
) ?. l' {8 }/ Y8 B# B2 A随着数字世界的不断推进,我们将会转向使用3D照片、AR、VR等技术,因此未来需要更准确的理解场景中对象、交互动作等一系列复杂的问题。
$ R2 y& E: J5 P5 P; kFacebook表示:能够开发出向人类一样理解现实世界,并与之互动的AI系统是其长期目标。诚然,这就需要不断缩小物理空间和数字化的虚拟空间之间的隔阂与距离,而在3D视觉方面就还有很多工作需要大家共同努力。6 u! i% `! y6 e% E+ z( X: E
参考:0 e6 K2 ^9 q \
https://ai.facebook.com/blog/pushing-state-of-the-art-in-3d-content-understanding/
. F( J, }( C' @* O u(END)
5 b: l/ ^0 d) N7 K' o/ h
! O8 i: R; r* C, ], _# _. t 推荐阅读
" G4 D: ^% o, O2 [/ t0 F$ w( z8 G" _3 f
 9 ^0 f% F/ ?3 D; D 9 ^0 f% F/ ?3 D; D
+ Q1 f3 P7 Q1 r- ?" |! F. f
8 I- {7 O0 P1 B, f, x) e/ D ; x) S# E- `" P4 Z ; x) S# E- `" P4 Z
4 _0 N4 L+ ?# K$ d, Q F5 ~& d, Z) o- H# N$ \$ L7 \+ b
 / Q, t2 { i: v% G; d4 w2 N9 Z / Q, t2 { i: v% G; d4 w2 N9 Z
 每天五分钟,轻松了解前沿科技。 每天五分钟,轻松了解前沿科技。
- y' Y [! u. z$ Z2 D! j. T —— 青亭网  
0 k) E0 k% V: ]8 a; B来源:http://mp.weixin.qq.com/s?src=11×tamp=1572444005&ver=1944&signature=Nb57qrD6cXqllnhJvEE6H6occUi*WX3i2MU6ToOnegiW6vhKPmdGUN4DuPLvPk3UGjMXyZcIIma3RpHXHPcUaJQxDFHSnOz9N*hHRaEl1BiKeHC0O4YFvbD8CwX78lCz&new=1: a% i$ O0 V; I, |+ @: Q
免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! |
本帖子中包含更多资源
您需要 登录 才可以下载或查看,没有账号?立即注册

×
|
 /6
/6 
 |手机版|小黑屋|梦想之都-俊月星空
( 粤ICP备18056059号 )|网站地图
|手机版|小黑屋|梦想之都-俊月星空
( 粤ICP备18056059号 )|网站地图

 发表于 2019-10-30 22:35:04
发表于 2019-10-30 22:35:04
