|
|
 Esther| 编辑
, l [$ z+ _0 c9 A8 }* ?7 J此前,青亭网曾报道过微软一项名为Torc的VR力反馈模块研究技术,它的特点是可以利用硬实的表面来提供丰富的体感反馈,当用户用两根手指在力反馈表面上移动的时候,能够感受到虚拟物体的纹理和弹性,它甚至能模拟解压球的弹性触感。# J5 q6 V8 F. Y0 g1 Q9 B
而在近期微软公开的三篇VR相关论文中,也曾有一篇提到了另一种可以模拟球体等虚拟物品的力反馈技术:CapstanCrunch(前两篇参考:《不用透视功能,戴VR头显上街是什么感受》和《除了注视点渲染,眼球追踪还能做什么》)。
9 R3 H! a6 V1 b+ m% {: S6 S0 u6 D: j据悉,CapstanCrunch是微软在VR力反馈领域的另一种探索,与Torc的最大不同之处在于,它不是通过坚硬的表面来提供阻力,而是利用绞盘式定向制动系统限制手指活动的原理来模拟力反馈,这样做的好处是可将输入力量提高40倍,并且只需要搭配低成本、低功耗的小型马达,马达并不会直接接触到外部压力。; a4 F Y9 A7 U
(绞盘原本是船员用于控制绳子的一项工具,用在体感反馈装置中可模拟小型内部马达数倍的力量)) P& [3 M" `$ i2 Q9 u4 Z$ c+ s
1 [1 A v6 l9 I& O# A# I% _/ YCapstanCrucnh乍一看有点类似于微软此前研发的另一种体感反馈原型:CLAW,不过前者更加轻巧且低功耗,能够模拟20牛顿的力反馈,除了制动系统外,还结合了离合线弹簧来提供主动的阻力反馈。8 _) X0 c3 q% C% @9 A

* d2 U$ g5 c" {3 I+ u7 m" J3 Q% T左:CLAW,右:CapstanCrunch
( }& p8 s6 ~* A4 s- b关于原理
! F: b! X' M/ t/ s9 w: I% T( D6 w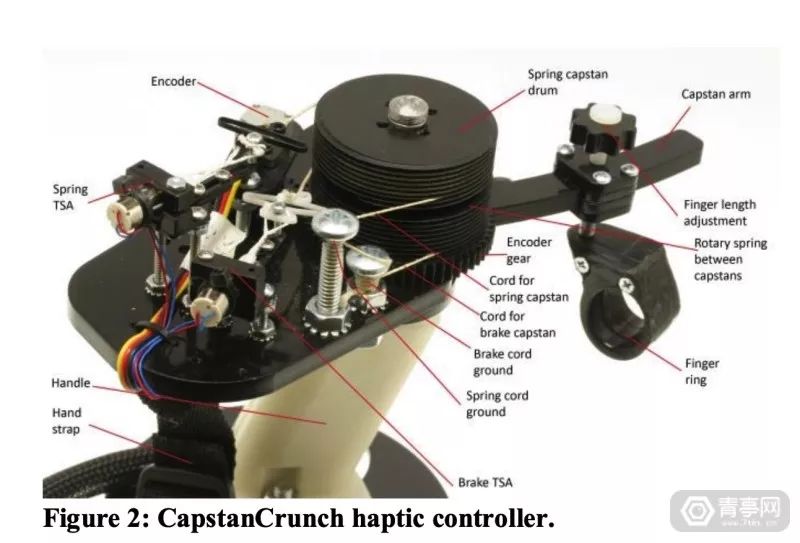
7 P; m" R( p* \$ k微软指出,CapstanCrunch提供力反馈的原理类似于柔道运动的理念,即:利用用户主动施加的力量产生的反作用力,来将马达的效率最大化。除了低功耗外,CapstanCrunch与前代技术相比,还具有低成本、稳定、安全、安静、快速等优势。
. G* `' M* I' O* `( x0 p; X1 @0 m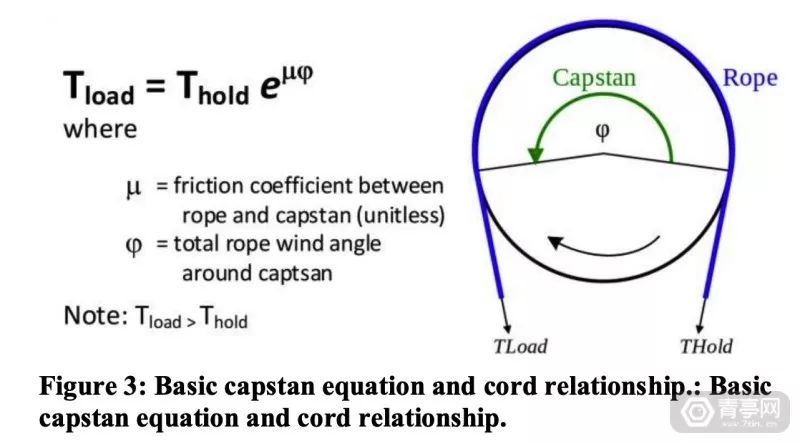
* s& Y$ w1 `& Y, H& \9 b' J" B它基于独特的可线性调节的摩擦式绞盘制动系统,优势在于不需要使用大型高功率电力消耗且昂贵的致动器。4 Q' J N ]# o- O

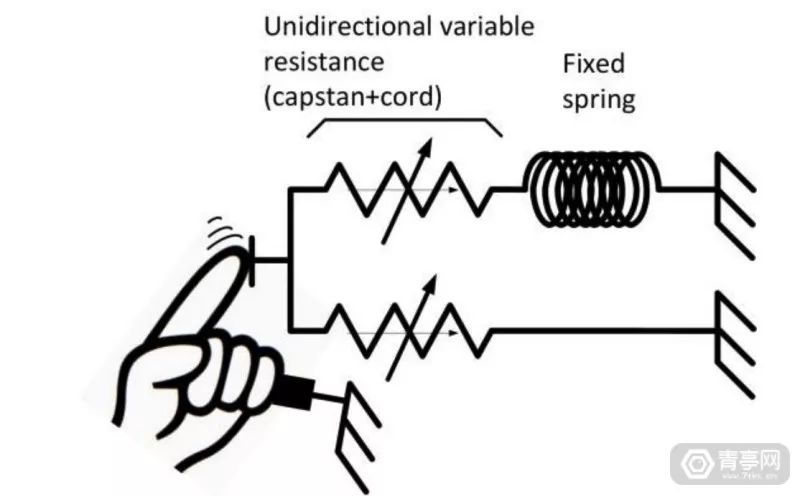
; s, F: R# a& z: t+ d7 s7 f在CapstanCrunch中,力反馈是通过绞盘卷筒与绳子之间的阻力来实现的。二者之间的阻力关系可以是静止的(静止状态的绞盘),也可以是动态的(绞盘旋转),经过测试,微软科研人员找到了一种静态与动态阻力的差距和滞后最小的搭配方案(黏着-滑动细数小),这样就可以让绞盘的制动系统以线性的方式运转。6 \. y# O: B4 f; e9 U9 P
完成版CapstanCrunch原型系统采用两个串联的绞盘和Vectran线绳,与此同时还用了旋转的弹簧与两个绞盘相接,以此来生成程序可控、可塑的体感。8 l! j) _8 k; n
 : S" n- x! i7 g/ `. p4 W, u : S" n- x! i7 g/ `. p4 W, u
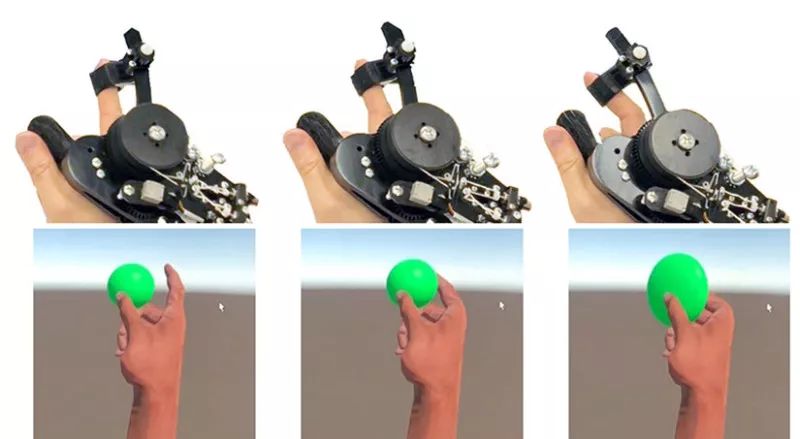
在CapstanCrunch力反馈系统上,还搭载了6DoF Vive追踪器,用于追踪用户手部在VR场景中的位置,并通过逆向运动学在VR中模拟人手。+ H& e. R2 |2 e, A( H6 g6 ^
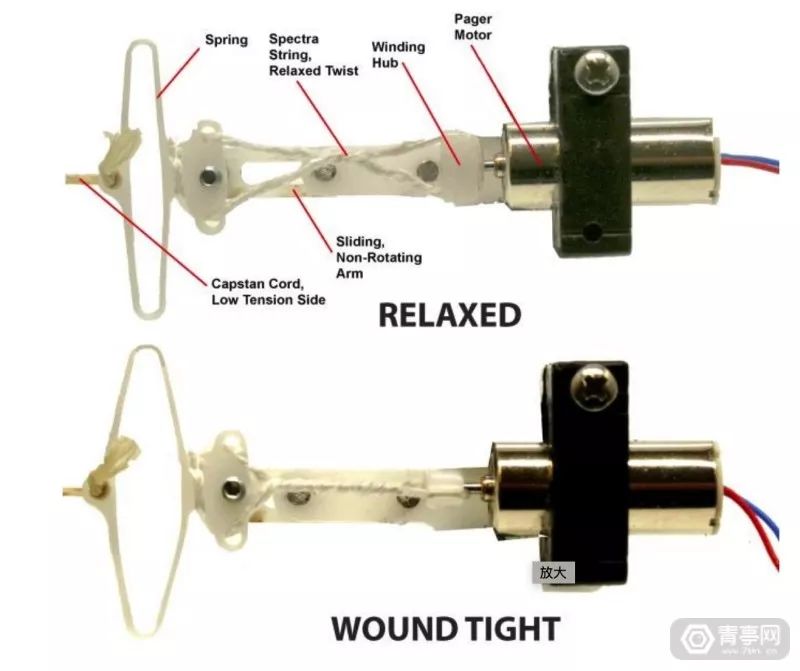
6 |( M' [* ]$ Z: l. h前面曾提到,CapstanCrunch采用了线性制动系统,与大多数绞盘系统不同,它的线绳并不是根据卷筒来移动的,而是由人手来旋转卷筒,而线绳是固定的。同时,还有一个小型的内部致动马达会对线绳施加较小的拉力,而线绳上拉力较大的一面则固定在手柄上。
& |: E& W$ ^3 z* j8 J% l( r/ s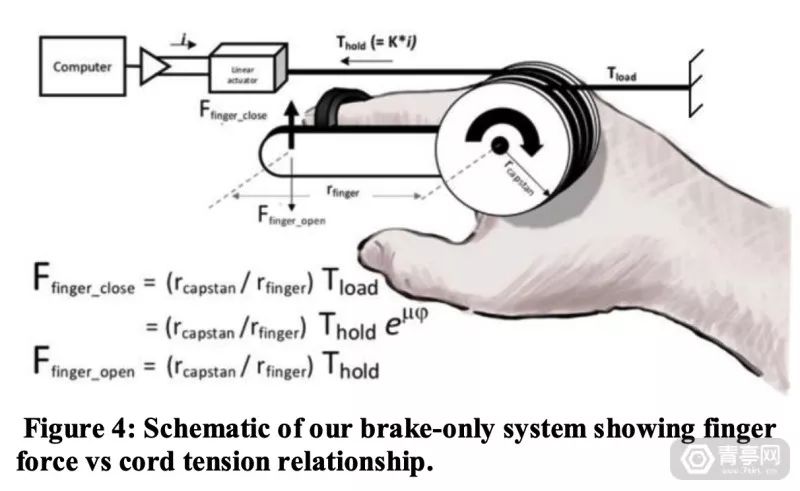
3 p$ A# [% d! _. F! I当用户想要以逆时针方向旋转绞盘时(手指靠近),致动器几乎不施加拉力,而绞盘卷筒也移动更自由,没有阻力。当致动器拉力增加的时候,卷筒会更向逆时针方向旋转。
6 b- I/ U9 J, v2 i. d2 |! F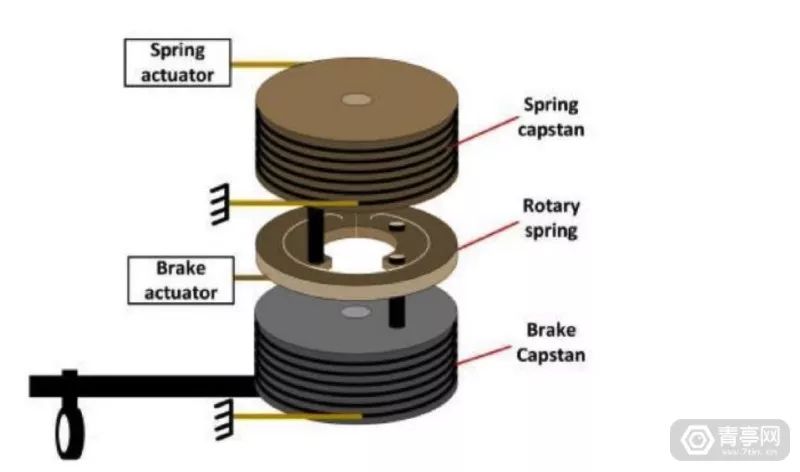 ( k, Q4 z& {( p/ d* ?9 a ( k, Q4 z& {( p/ d* ?9 a
为了增加力反馈的可塑性,科研人员将CapstanCrunch在制动绞盘上通过旋转或扭力弹簧连接了另一个绞盘,第二个绞盘的作用类似于离合器,会在合适的时间启动弹簧。
5 w* @5 K) _. n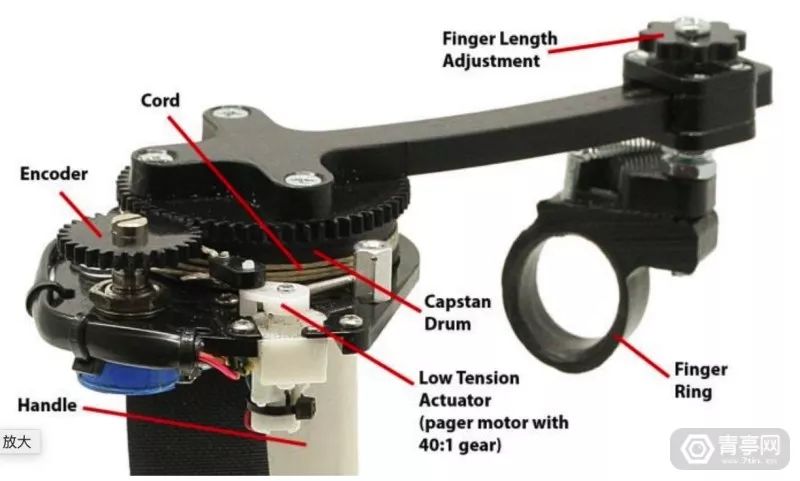
: p/ T7 d( V$ f/ M- S" X可模拟的情境. D8 Q/ I. ?0 N7 s4 f! i
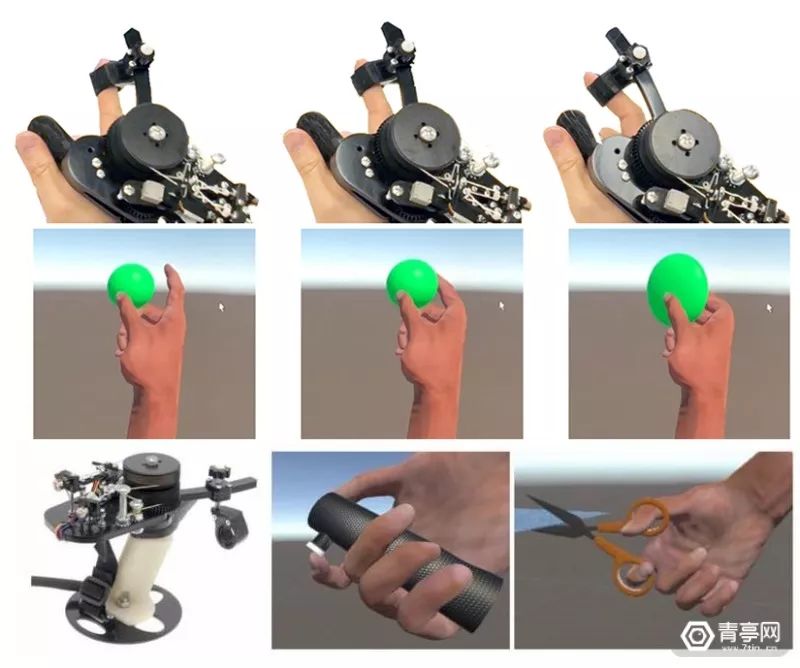
为了验证CapstanCrunch的效果,微软科研人员将它用于模仿4种不同的力反馈场景。除了模拟弹力球外,还可以用来模拟更复杂的按钮、积木、剪子等交互。* d( w4 l9 u) ^9 d
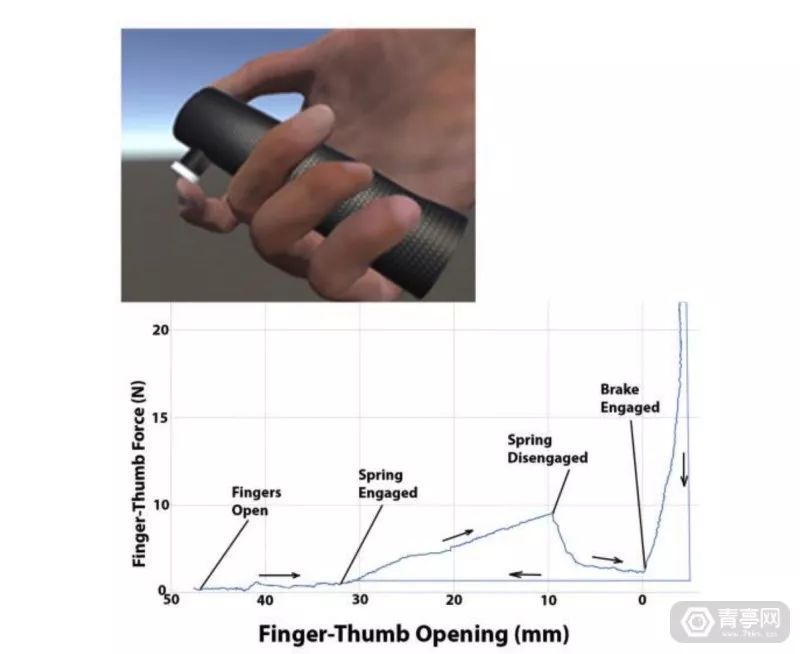
- y* |7 L0 S0 r8 @在模拟按键的时候,首先用户手指会触摸到制动系统的表面,然后顶着弹簧的阻力继续按压,接着制动系统松开,用户就会感觉到按按钮的体感,再然后按钮达到完全制动。与传统基于弹簧的力反馈系统不同,CapstanCrunch利用弹簧与制动系统结合的方式来模拟按按钮的动作。
/ O- i5 Z K0 o V* n3 E" H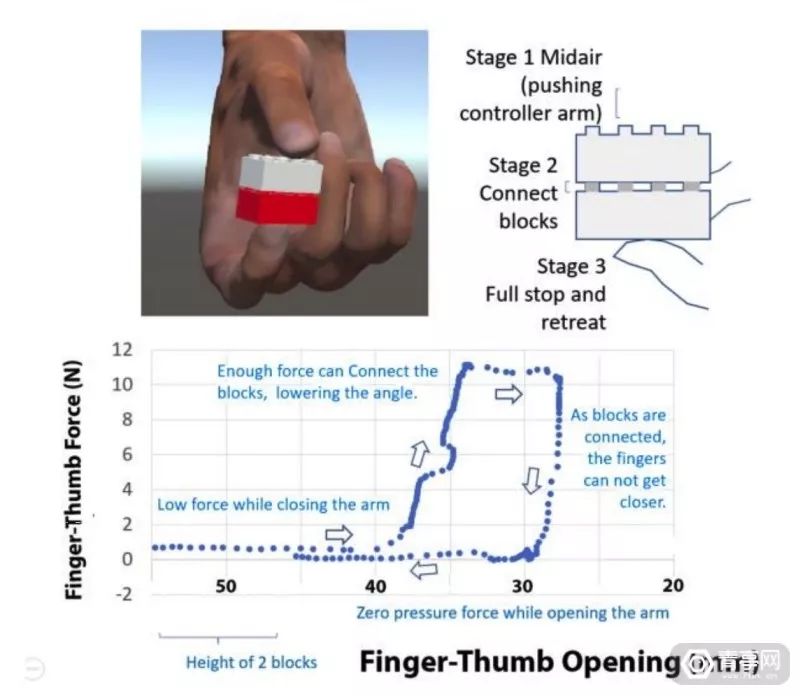 - O; W9 z$ v% R3 j, | @6 c& g8 _ - O; W9 z$ v% R3 j, | @6 c& g8 _
在另一个例子中,CapstanCrunch可用于模拟拼接积木的动作,这个场景分为三个步骤实现:首先,你可以通过让两根手指靠近来将两块积木拼在一起,接着,施加压力将两块积木固定在一起,最后制动系统完全停止,意味着积木拼在一起了。; [. _! H1 ~6 E# B: n# T M6 z
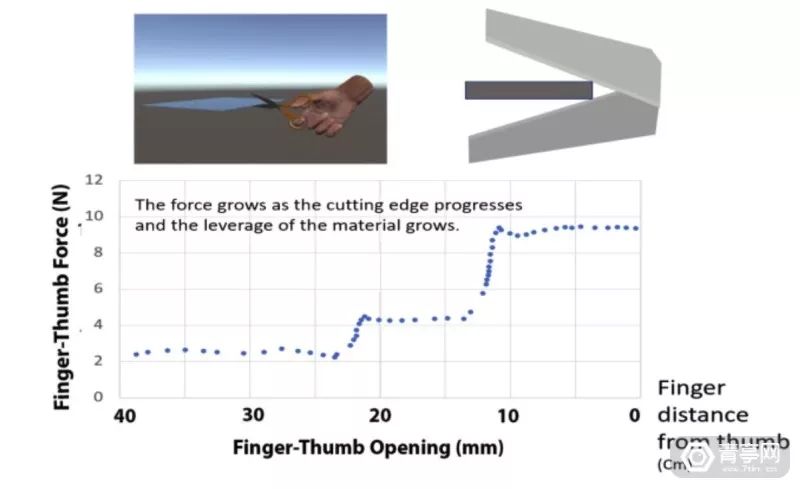
1 _' z. N) g# s* u此外,CapstanCrunch也可以用于模拟用剪子剪东西的动作,通过一套离散的步骤来预估逐渐增加的力度,以此来模拟不断增加的材质杠杆长度(也就是剪东西的效果)。- W. d9 w8 V; g7 a
总结
7 D5 z4 e8 C2 o9 f, J通过实验与调查,科研人员发现CapstanCrunch在模拟半空抓取动作的时候,比此前的CLAW方案效果好得多。二者不同的是,CLAW提供的力反馈更小,不过CapstanCrunch在制动系统没启动的时候并没有力反馈,而且可以适配较低端的致动器。6 e% z6 B4 u( g
未来,科研人员将进一步降低CapstanCrunch元件的大小,并将绞盘和致动器的体积缩小到能够放入手掌大小的手柄中。甚至,还有望将力反馈的范围扩大到更多手指。此外,为了优化CapstanCrunch的触觉反馈,预计在其中安装一个接触指尖的音圈致动器,并且还会在拇指的位置加入一个触控板,用于优化手指与虚拟物体的交互。
( Z# L' D, w3 D" h; j3 z) H, n其实,尽管CapstanCrunch采用的绞盘式力反馈方案比较少见,但是通过限制手指活动来模拟力量的方式并不是新的概念。比如,岱仕科技旗下的Dexmo手部外骨骼式力反馈手套也是通过向手指提供反作用力,来模拟真实物体的握感。
/ Y# W% L7 N+ N. n( O(END) / M9 J0 Q: S) g( @1 ^. w' {, U
- H+ b2 x K3 k$ T* k) W& T
推荐阅读 , s3 H+ `/ x$ Y8 [ p. T$ L L
4 P6 t! ~7 I* g" O4 e* O
+ U/ h# H( [6 {6 ]
* B$ o e' @% }1 j
2 n' @! d, k# s1 C: \* o ?9 Z* j0 z5 g 6 s2 K& i @, Q# N/ f/ \ 6 s2 K& i @, Q# N/ f/ \
! B2 L+ D. Y" I
; D" }' C2 J @' v
5 N5 X- F! {7 s6 e) [" h 每天五分钟,轻松了解前沿科技。 ( O' Z0 \0 u% C% D4 T 每天五分钟,轻松了解前沿科技。 ( O' Z0 \0 u% C% D4 T
—— 青亭网  
; A9 K3 t, F6 @# u- |来源:http://mp.weixin.qq.com/s?src=11×tamp=1572134405&ver=1937&signature=gQE190DqKoBiYCrN014cgSHBoh*EmjZLsiCnBTB2nFPF-1LEys7XphOUQ75klViT8-x3LsTMU18lj5iwqfG69GaARasAuac5mS*jMtM5XY1zQPKcOPDainbDZMxSdFZh&new=1
4 @$ H/ t* W8 I$ D免责声明:如果侵犯了您的权益,请联系站长,我们会及时删除侵权内容,谢谢合作! |
本帖子中包含更多资源
您需要 登录 才可以下载或查看,没有账号?立即注册

×
|
 |手机版|小黑屋|梦想之都-俊月星空
( 粤ICP备18056059号 )|网站地图
|手机版|小黑屋|梦想之都-俊月星空
( 粤ICP备18056059号 )|网站地图

 发表于 2019-10-27 08:55:17
发表于 2019-10-27 08:55:17
